4 bit H Bridge
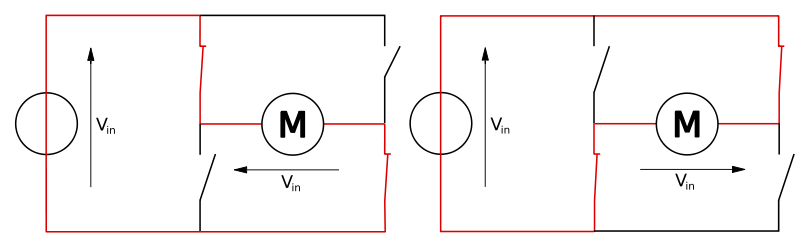 |
| two modes, motor turning in different directions |
From the wikipedia article:
| S1 | S2 | S3 | S4 | Result |
|---|---|---|---|---|
| 1 | 0 | 0 | 1 | Motor moves right |
| 0 | 1 | 1 | 0 | Motor moves left |
| 0 | 0 | 0 | 0 | Motor free runs |
| 0 | 1 | 0 | 1 | Motor brakes |
| 1 | 0 | 1 | 0 | Motor brakes |
| 1 | 1 | 0 | 0 | Shoot-through |
| 0 | 0 | 1 | 1 | Shoot-through |
| 1 | 1 | 1 | 1 | Shoot-through |
The last 3 are to be avoided, since they short the power supply. This would be controlled by 4 GPIO pins. But there is a better solution (even though the name might not be appealing...):
2 bit H Bridge
For the PyHack workshop at the beginning of december, we controlled some gearhead motors (and a bunch other stuff) with the Raspberry Pi:
The main thing with these motors is that they are regular DC motors and can be run from two wires. But to reverse them, we need an H bridge. But why use up 4 GPIO, if all we want is to have the motor turn right, turn left or free run?
All we have to do is connect S1 to S4 and S2 to S3, and use 2 GPIOs to drive S1 and S2. On a breadboard, it looks like this:
 |
| closeup of the h bridge, right in the middle |
{kind=link}
 |
| 4 different circuits: darlington array, direct, single and H Bridge |
{kind=link}
{kind=link}
We are using pins 4 and 23 to control S1 and S2.
The code
#!/usr/bin/env python import RPi.GPIO as gpio from time import sleep # set the mapping mode for the GPIO numbering gpio.setmode(gpio.BCM) # DC Motor connected to pin 4 MOTORA = 4 MOTORB = 23 gpio.setup(MOTORA, gpio.OUT) gpio.setup(MOTORB, gpio.OUT) print("Ready...set...go!") # Bring it to 3V3 (HIGH) gpio.output(MOTORA, gpio.LOW) gpio.output(MOTORB, gpio.HIGH) print("it is on") sleep(10) gpio.output(MOTORB, gpio.LOW) gpio.output(MOTORA, gpio.HIGH) print("it is reversed") sleep(10) print("done") gpio.cleanup()
Diagram
I'm working on a way to publish diagrams and breadboard layouts, I should publish it along with a bill of material in a few days.Update!: see the followup "Fritzing with Brython"
No comments:
Post a Comment